技术简介:
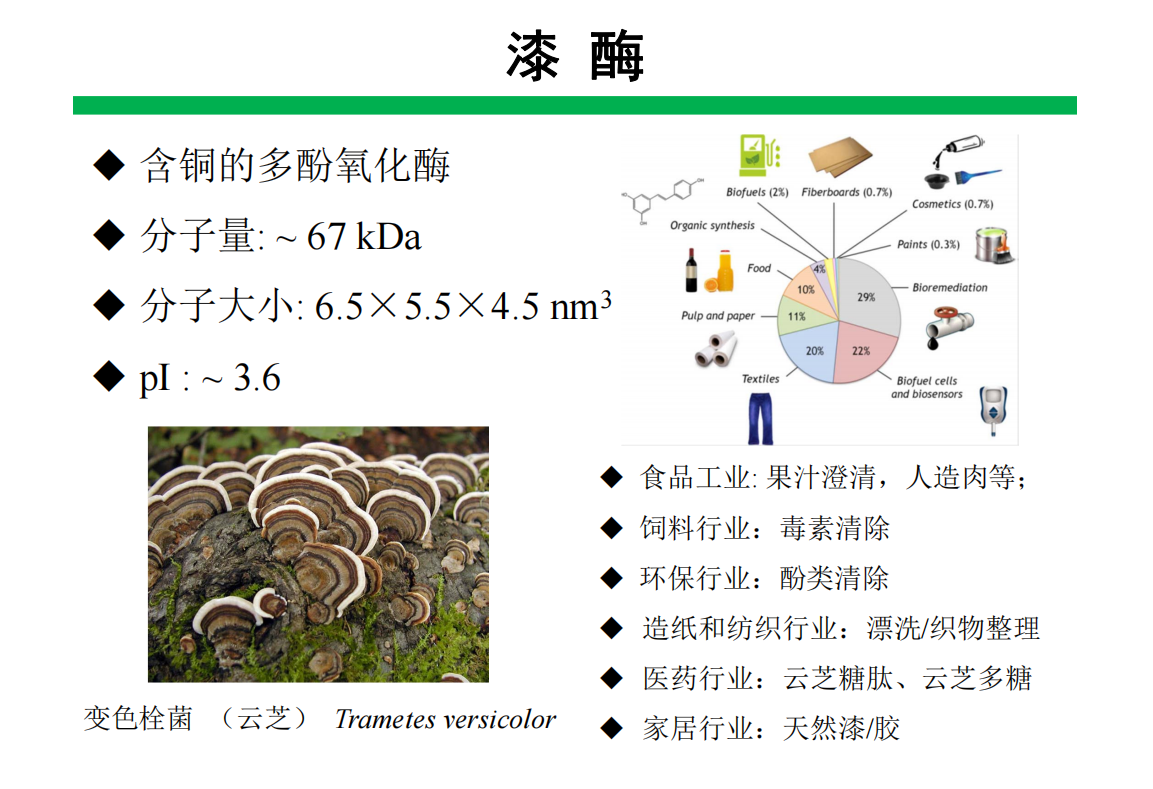
Лакказы - это белки, связывающие несколько ионов меди, и представляют собой медно-синие оксидазы, встречающиеся в грибах, грибках и растениях. Лакказы могут выживать в воздухе, а единственным продуктом реакции является вода, так что по сути это экологически чистый фермент. Поскольку в последние годы все большее внимание уделяется охране окружающей среды, лакказы стали предметом исследований многих ученых.
Уникальные каталитические свойства лакказы позволяют широко использовать ее в биоанализе, а в качестве высокоэффективного биодетектора она стала эффективным инструментом для анализа субстратов, коферментов, ингибиторов и других компонентов. Существует два основных типа биодетекторов на основе лакказы: лакказный электрод и лакказный ферментный маркер.
Этот продукт представляет собой концентрированный проэнзим, состав которого позволяет поддерживать значение pH в диапазоне 6,0-4,8 в процессе обработки. Однако, особенно в небольших дозах, для корректировки значения pH используется уксусная кислота. Степень отбеливания легко регулируется количеством используемой дозы. Поскольку реакцию можно остановить, контроль процесса очень прост. Дополнительная инактивация не требуется.




 Бизнес-партнерство
Бизнес-партнерство

